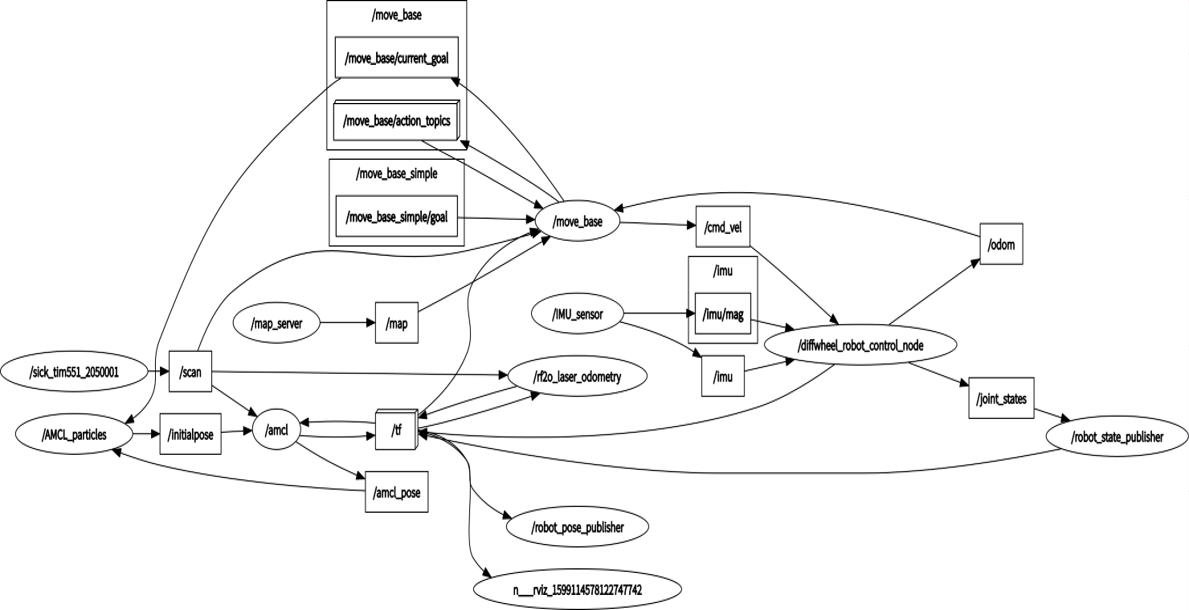
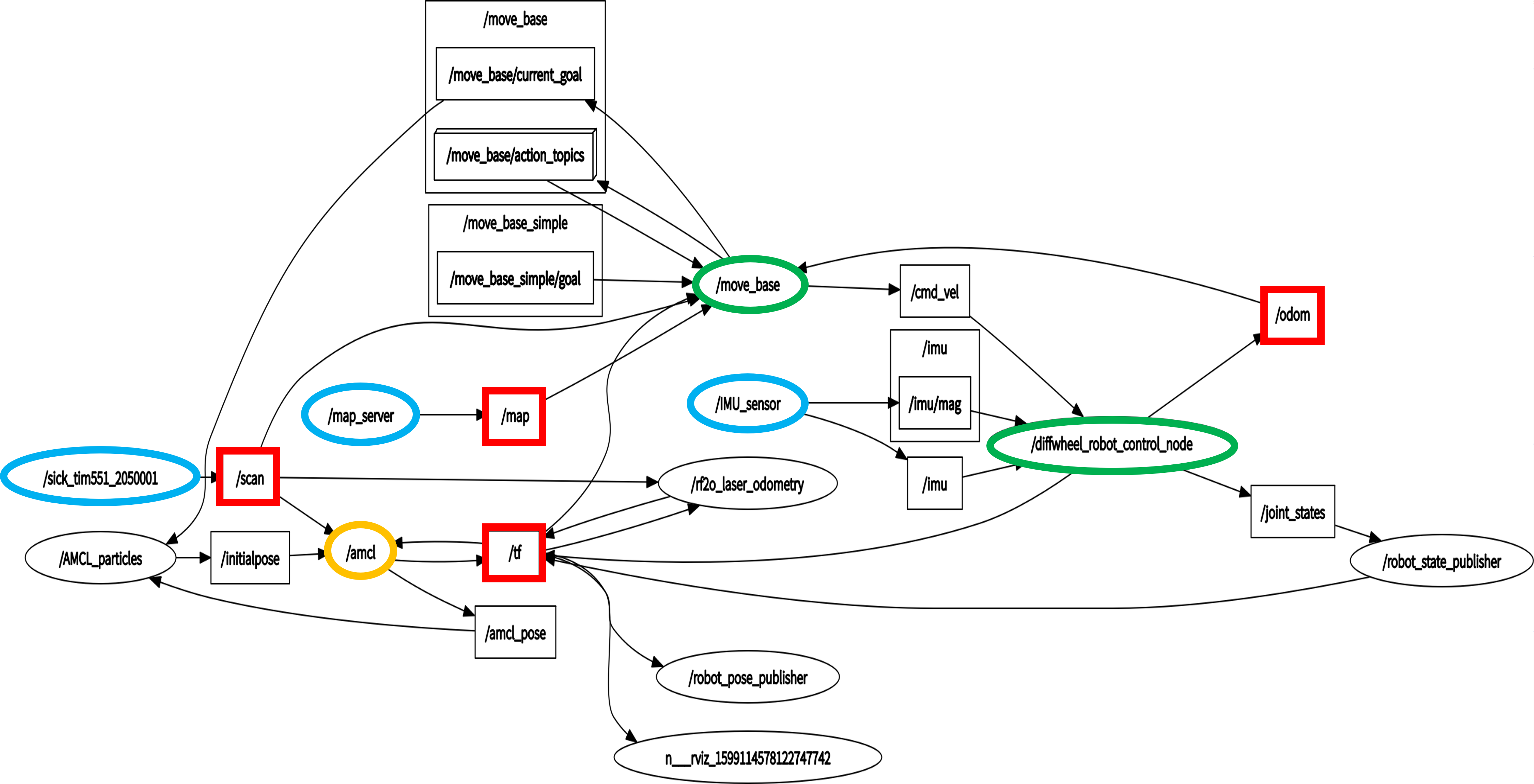
Node configuration
We will introduce how each sensor is organically intertwined and what function it performs.
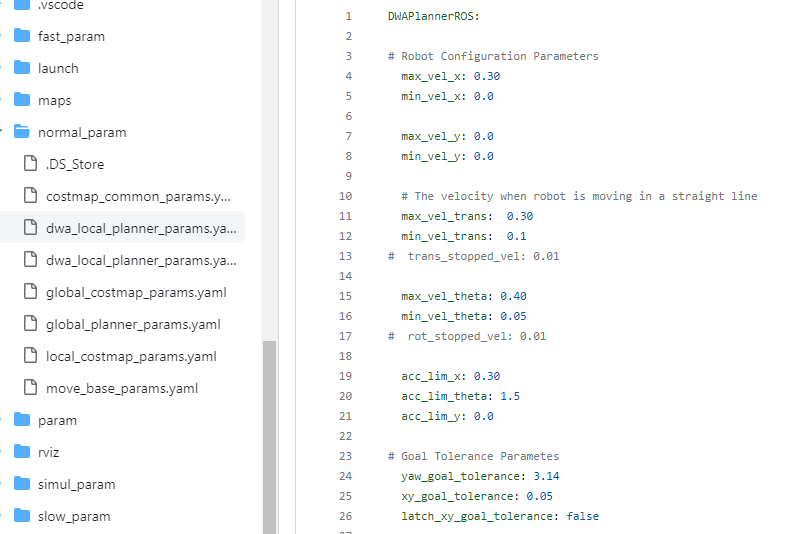
Path Planner
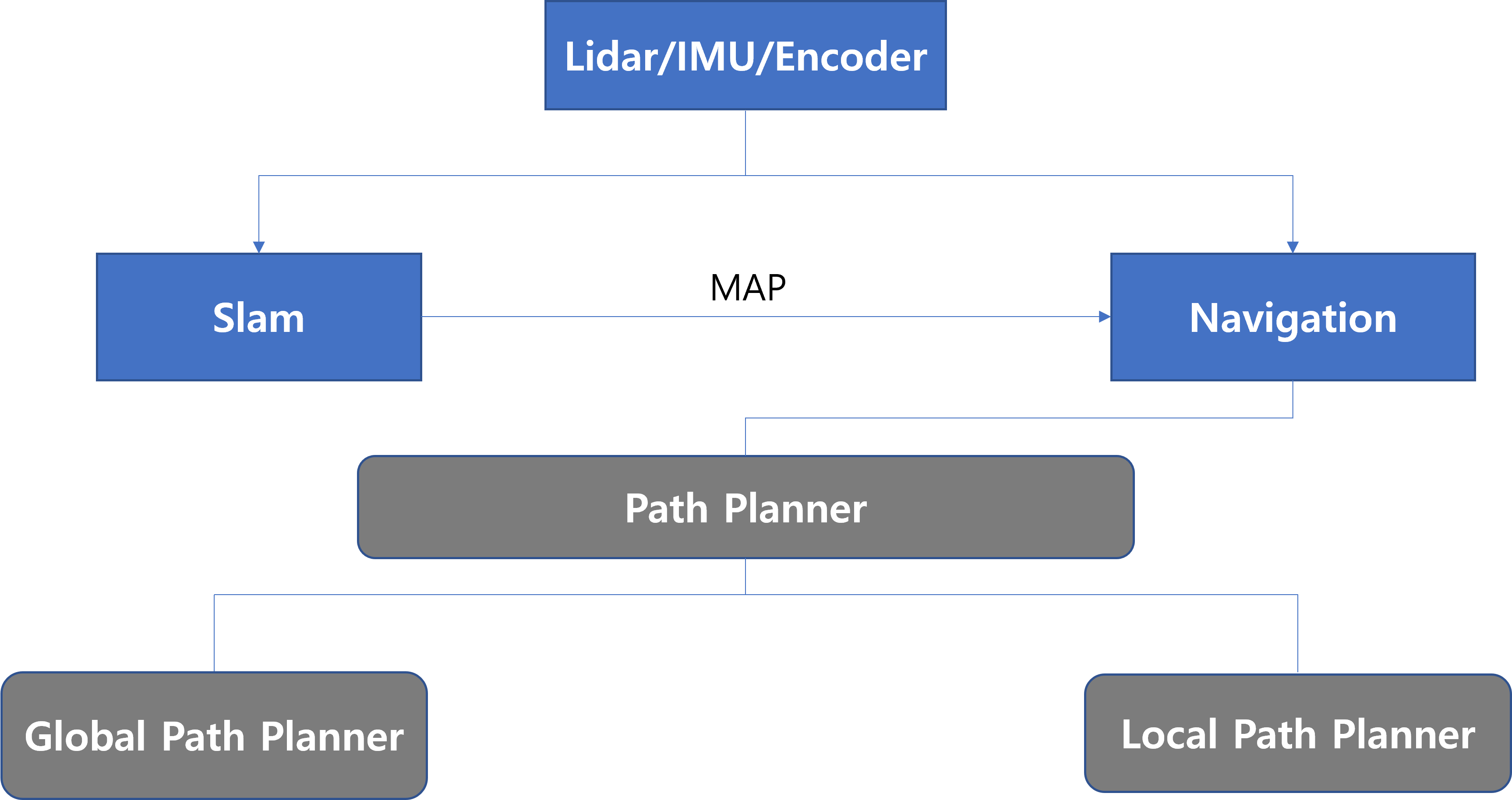
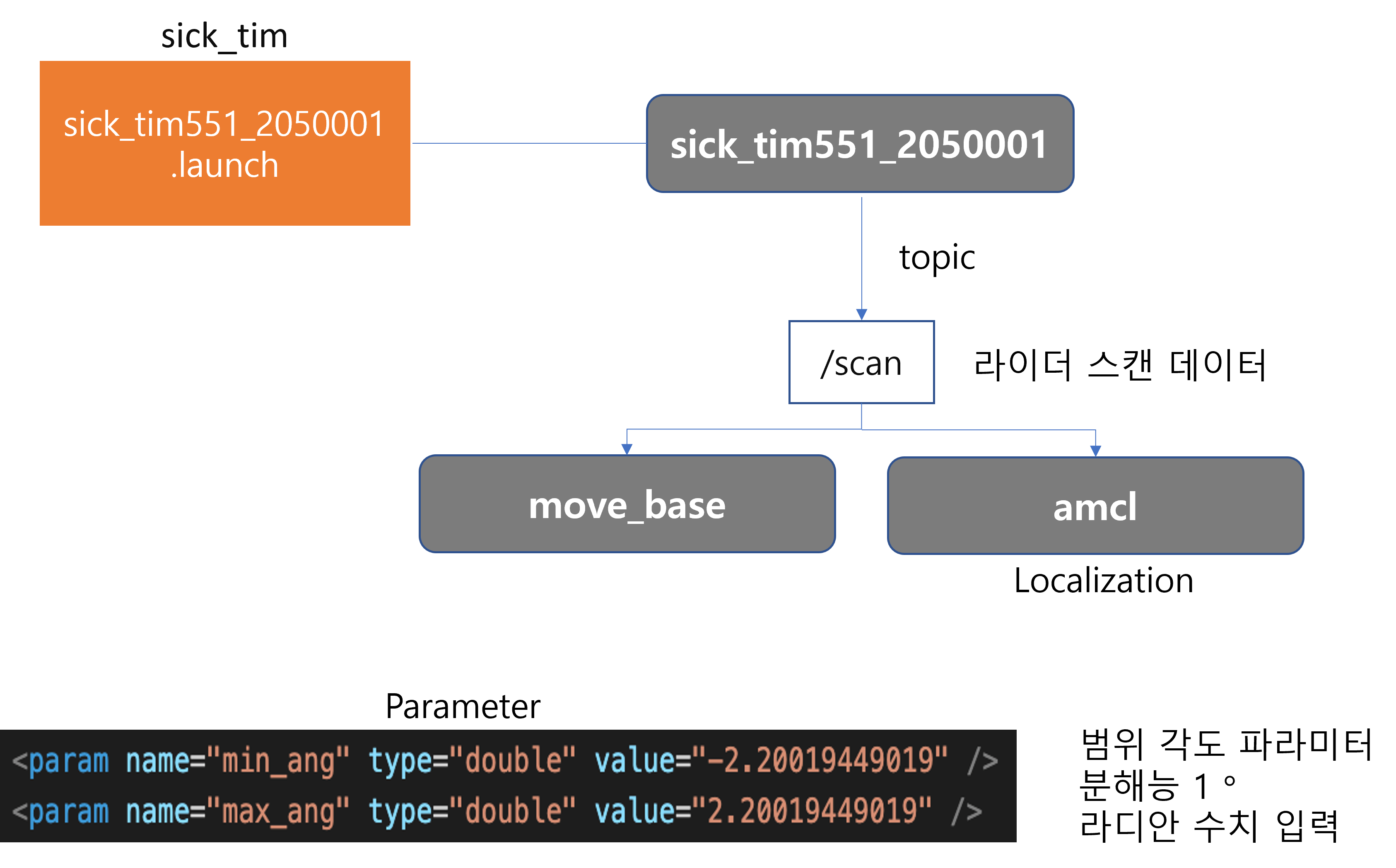
Autonomous driving control through three major sensors
Create autonomous driving routes through Path Planner
Consists of Global Path Planner and Local Path Planner
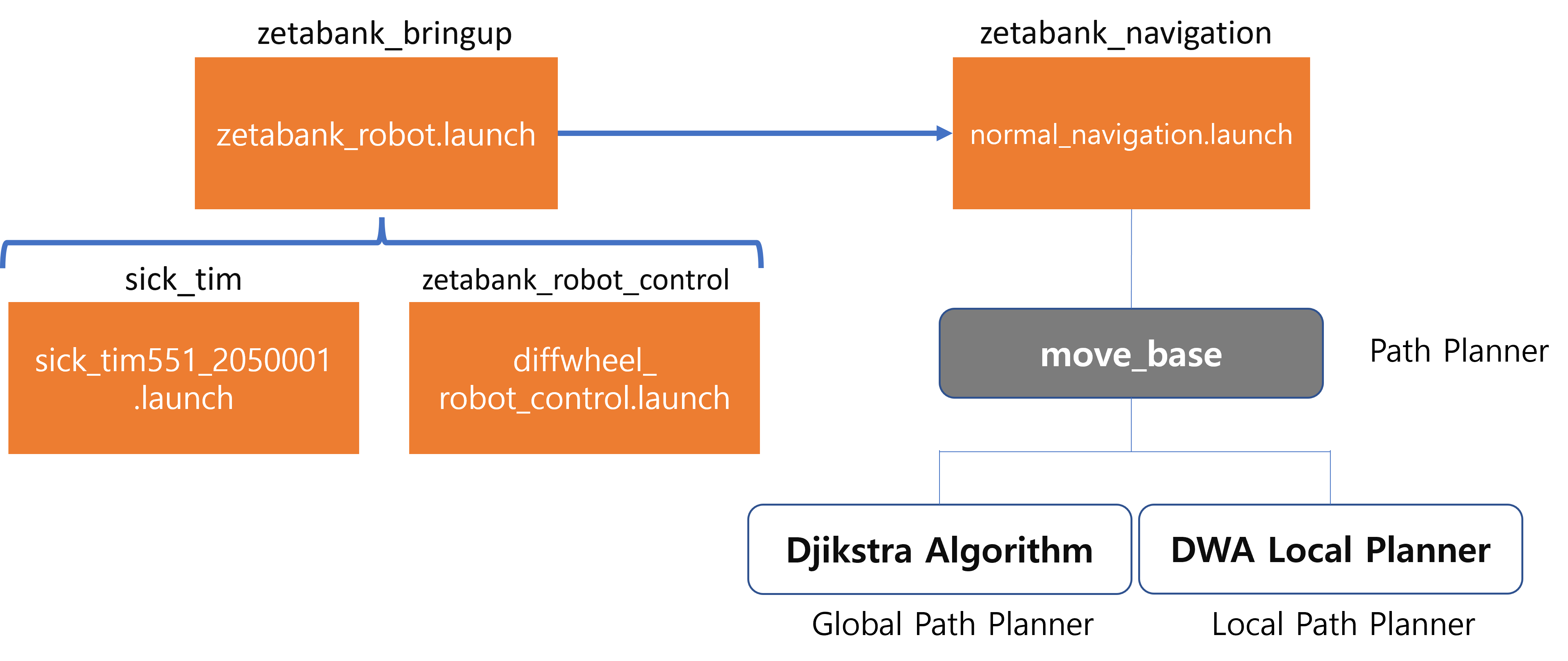
Djikstra Algorithm : Provides the shortest path from one specific vertex to all other vertices
DWA Local Planner : A path planner that plans a local path when a global path is given or a local goal is set. Used for evasive driving and bias driving.
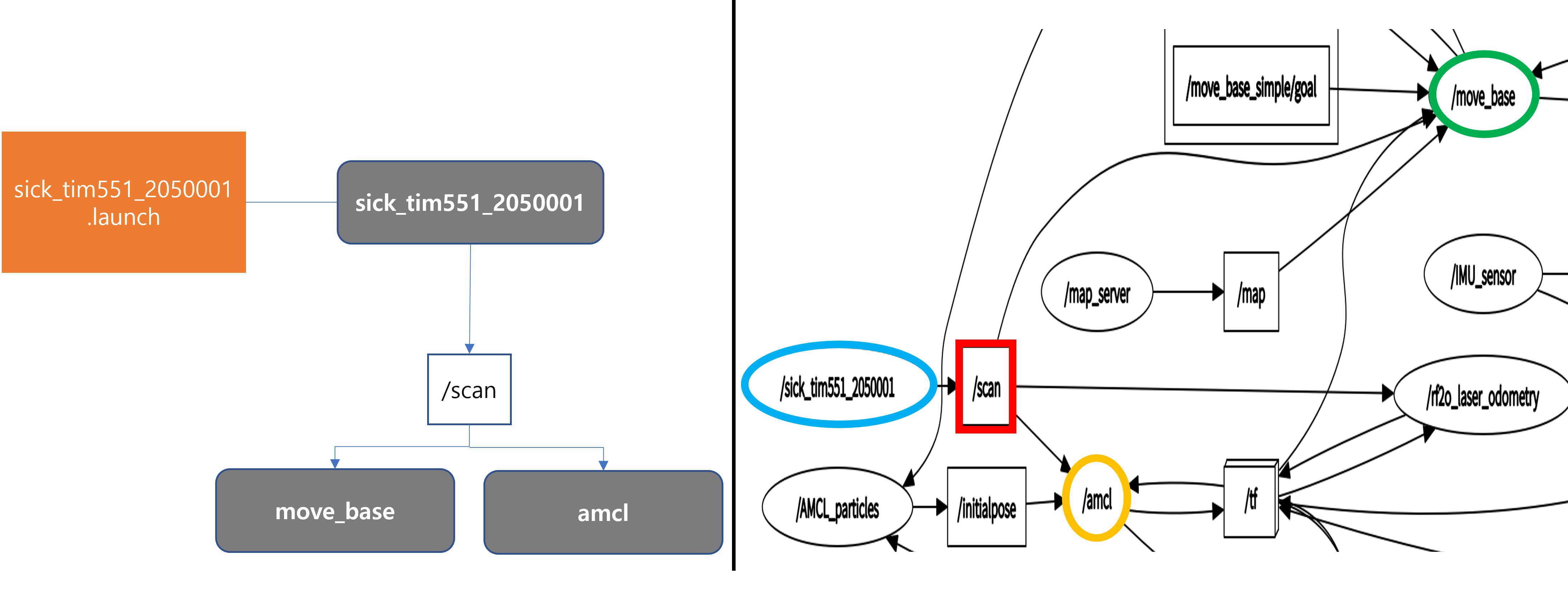
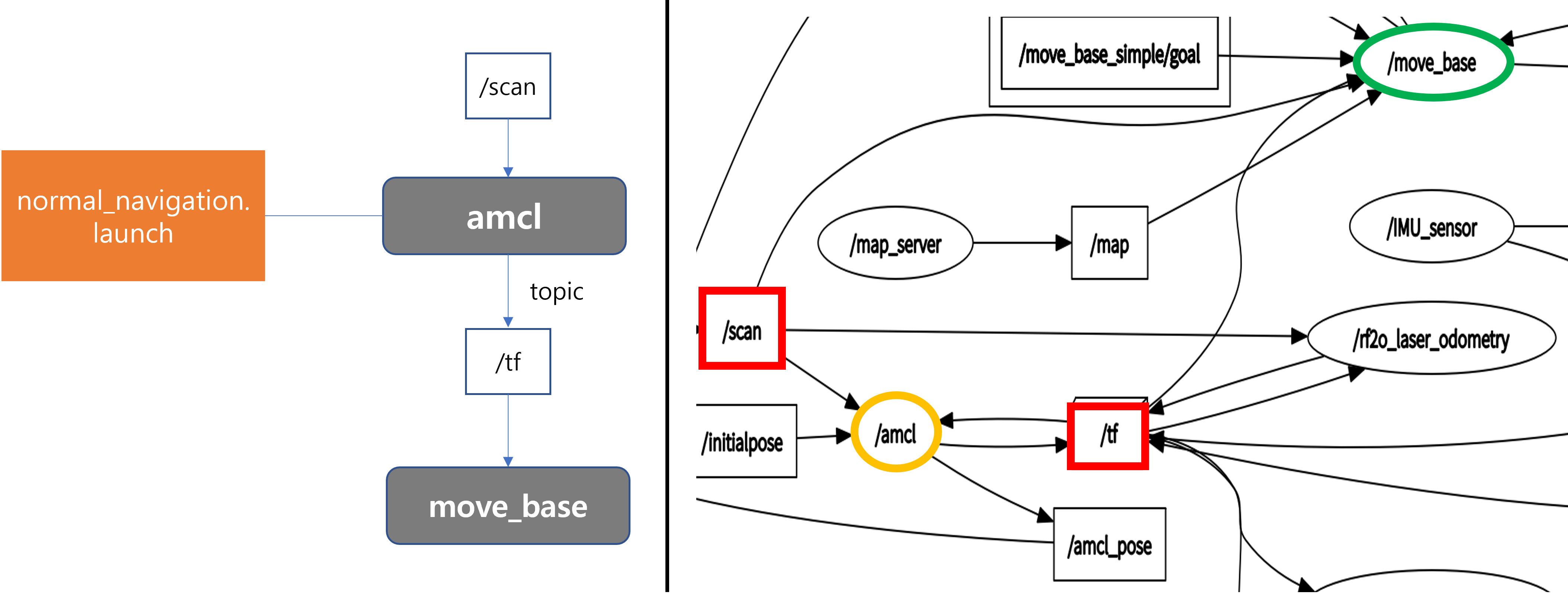
/tf
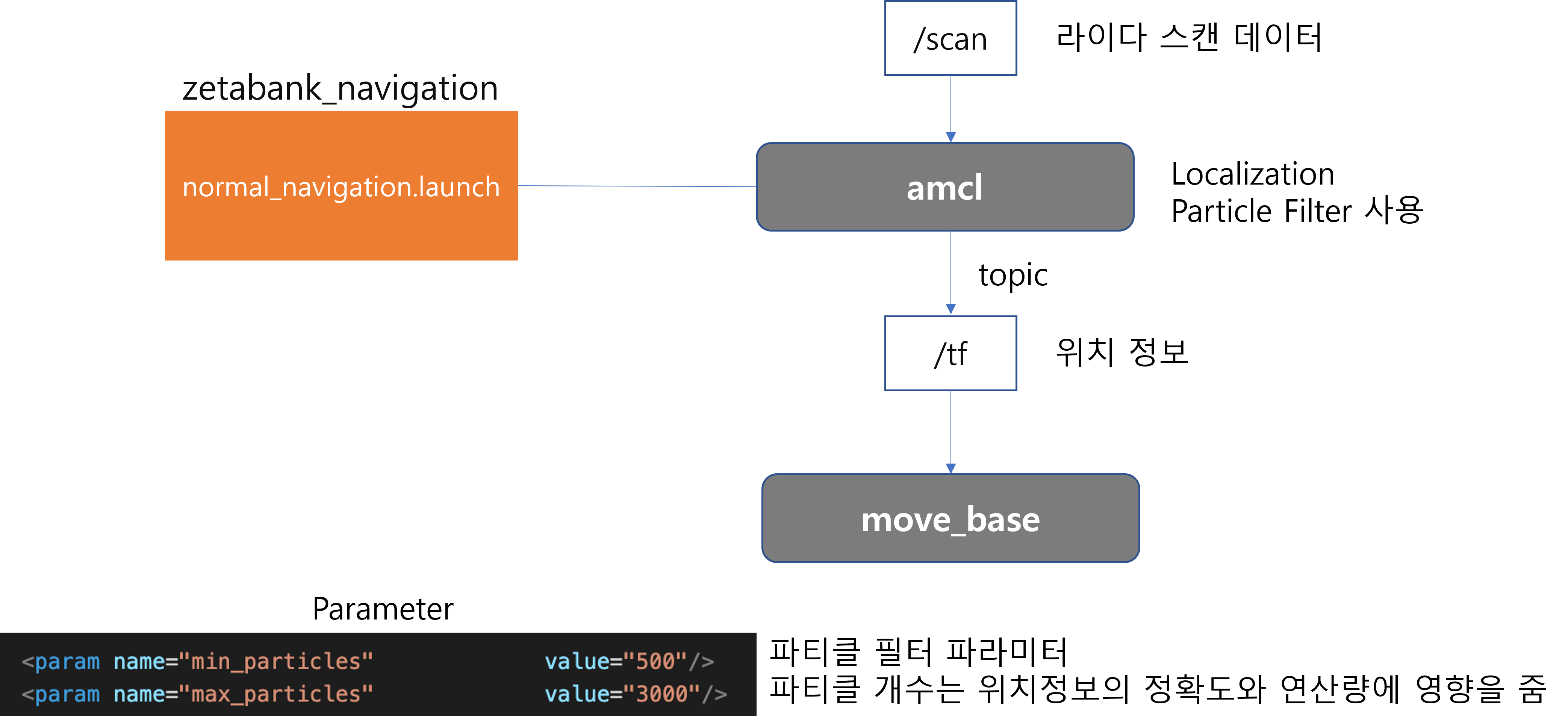
Generate tf data by processing scan data with amcl algorithm
amcl : One of the algorithms used to estimate and correct the position of the robot. Probabilistically predict the robot’s position by applying a particle filter to point data input from LIDAR data.
tf : A package that allows users to track multiple coordinate frames over time. Provides location information of coordinate frames that change over time.
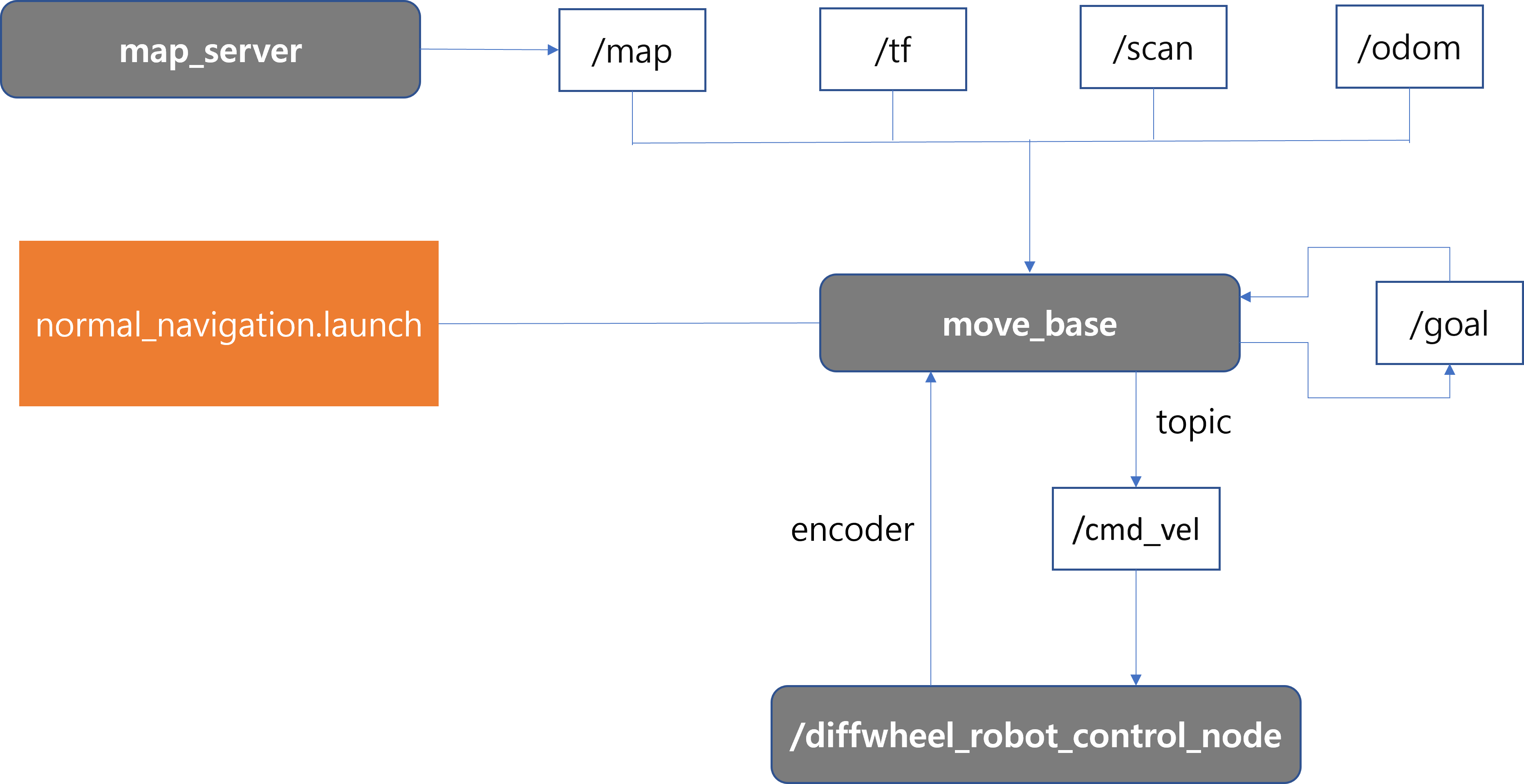
Diagram
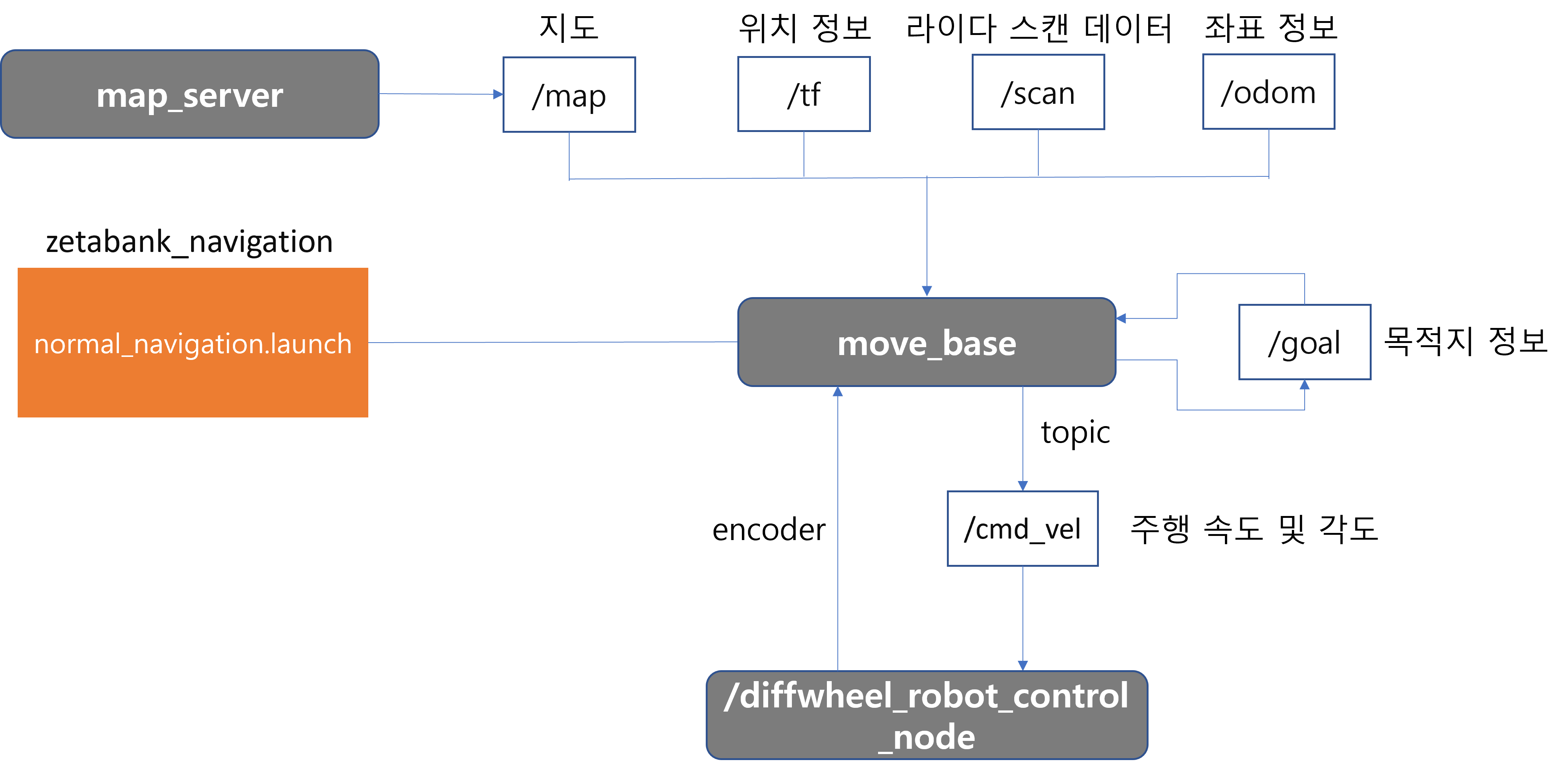
A driving plan is developed using four major types of data.
Through this, the motor is controlled and driven.
Receive real-time feedback on how much you moved through the encoder.
IMU : Sensors that measure acceleration and angular velocity
odom : The concept of estimating a relative location by determining how far it is from the starting point, rather than knowing the absolute location like GPS
Additional explanation
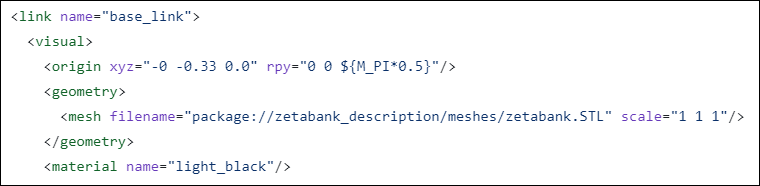
Setting the robot’s reference point
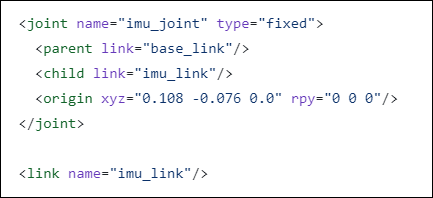
Coordinates and angle settings from the base link of the imu sensor
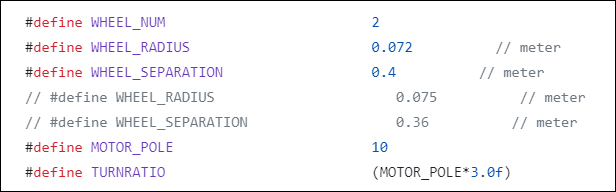
Set the radius of the wheels and the distance between them
There are many other things to set up as well.
Small differences in each value have a big impact on driving.
It is important to find the optimal value for driving through many tests.