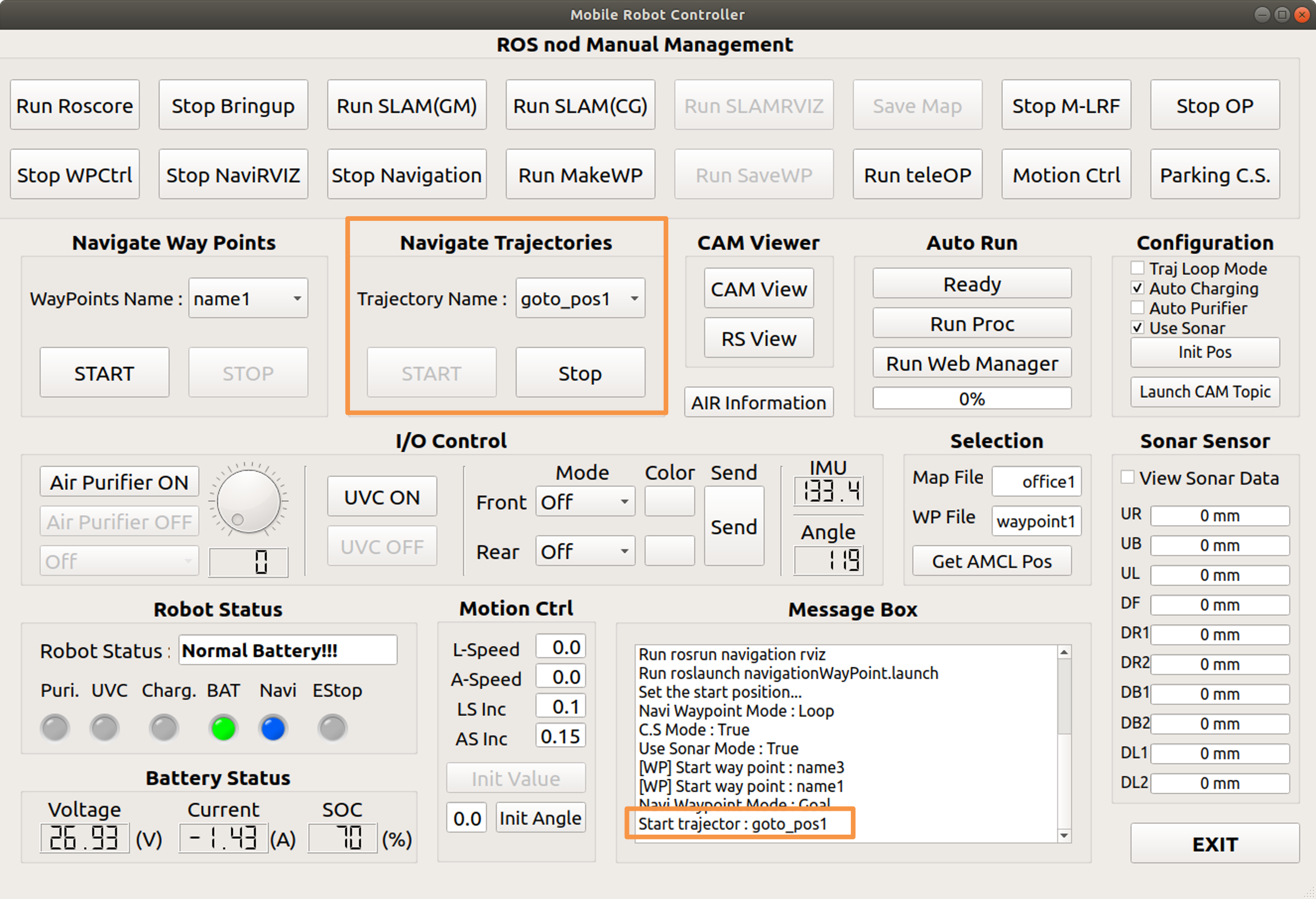
Navigate Trajectories
Driving by selecting a pre-registered trajectory from the drop-down menu
Desired coordinates are registered in trajectories, and it travels through these coordinates in order.
GUI execution screen when button is clicked
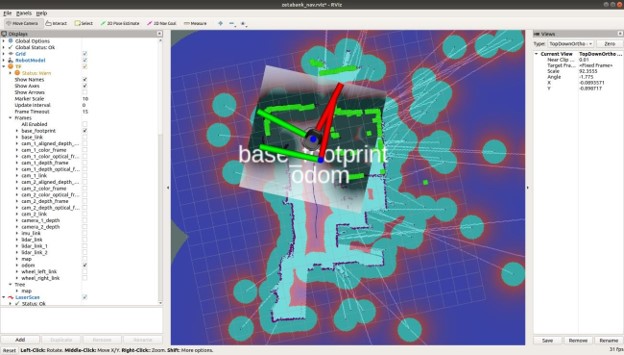
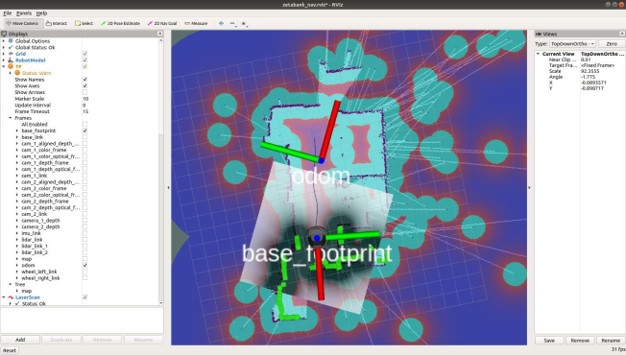
RVIZ execution screen when button is clicked