JupterLab Access & Run examples
Follow Along: About Codespace and JupyterLab
- Most of the code can be run on JupyterLab.
- Describes how to run code on JupyterLab.
How to connect
Access Zetabot JupyterLab and run the Topic Publish example
JupyterLab Access
http://10.42.0.1:8000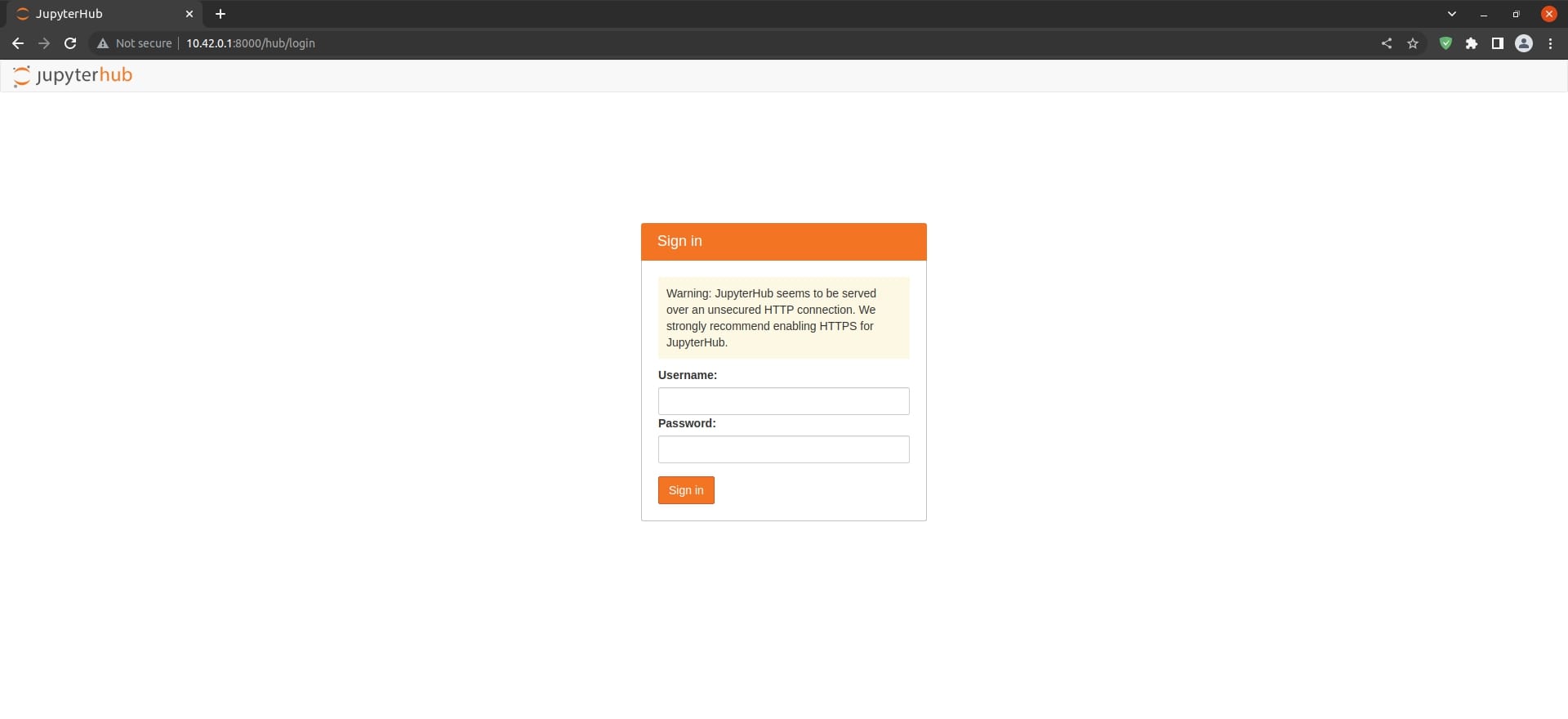
Input Username / Password
username: zetabank password: 12345678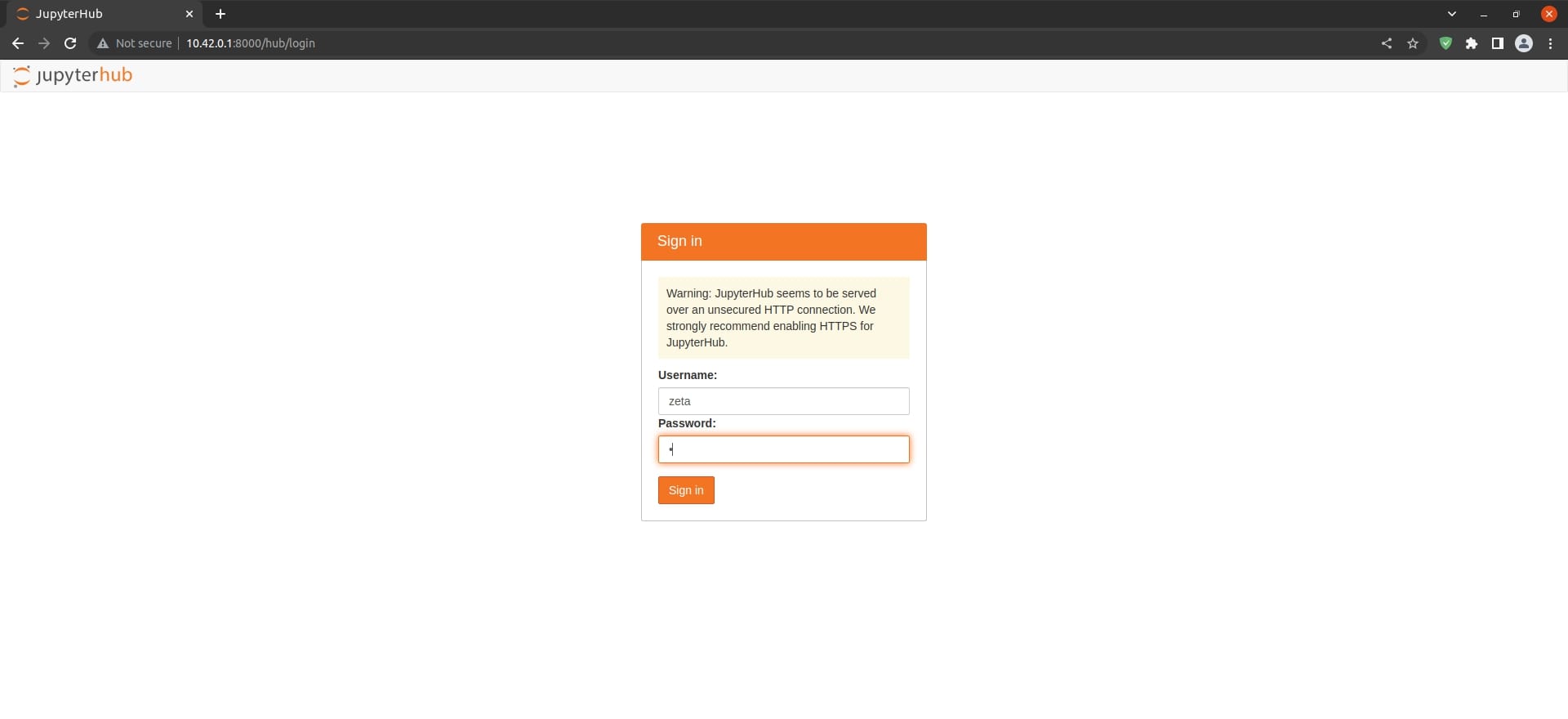
JupyterLab Main Page
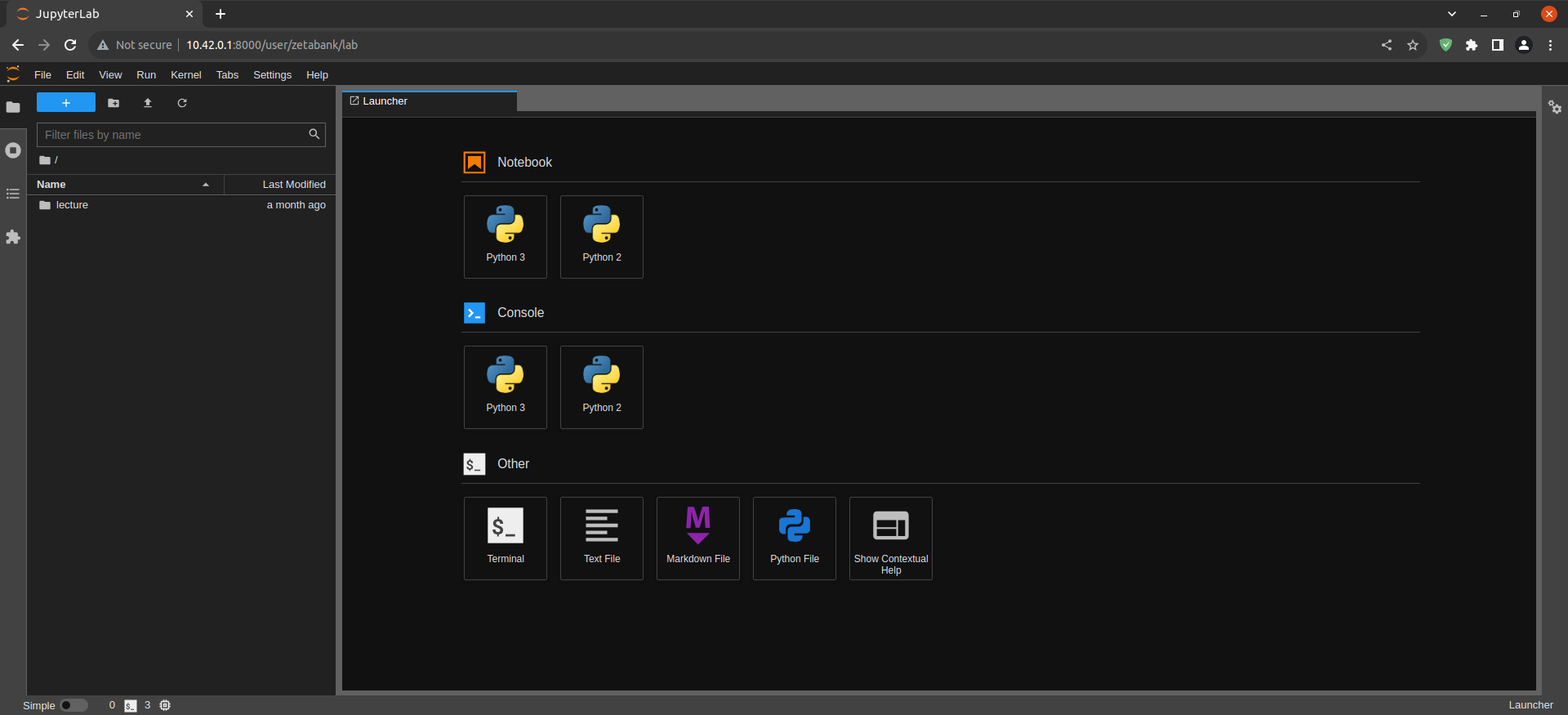
How to run code
Moving to ‘lecture’ folder
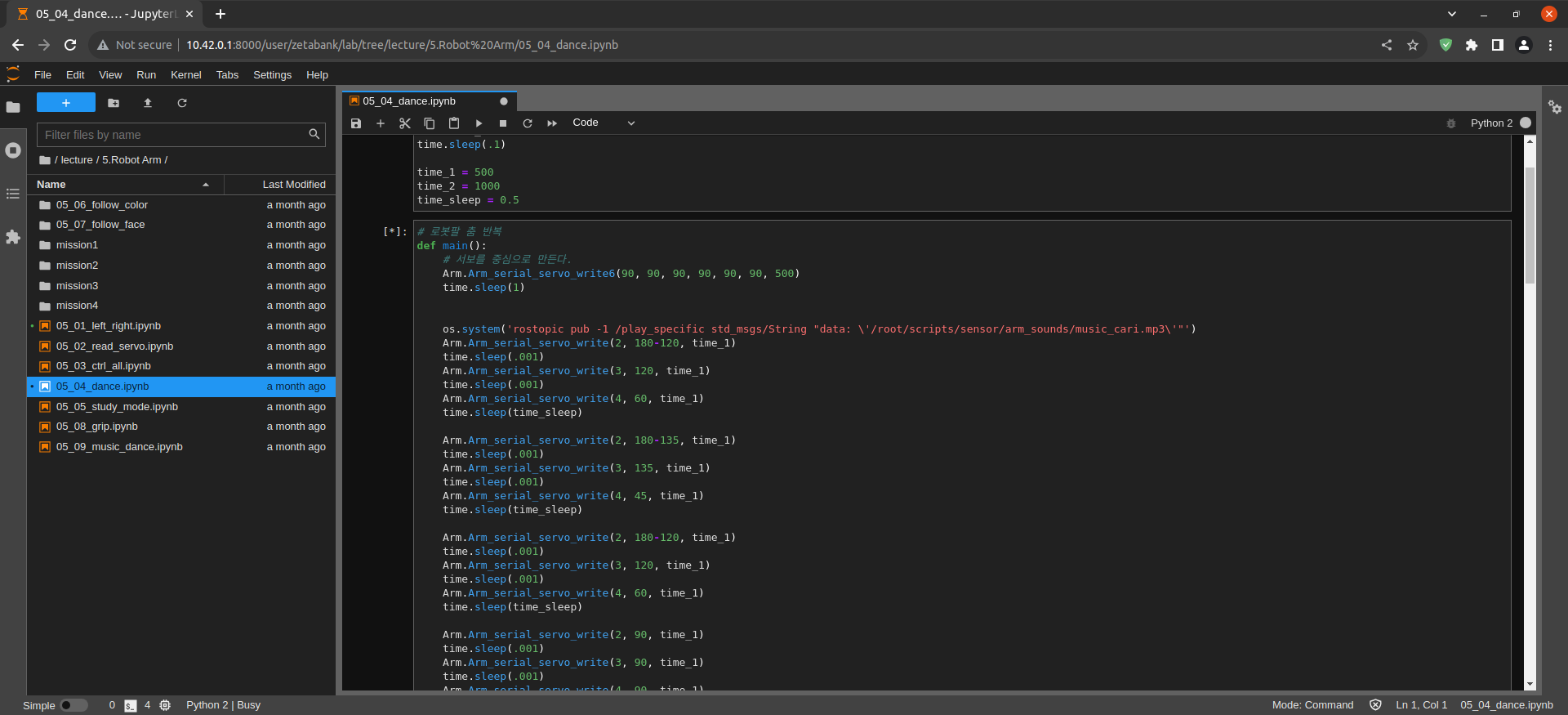
Moving to ‘5.Robot Arm’ folder
Opening 05_04_dance.ipynb file
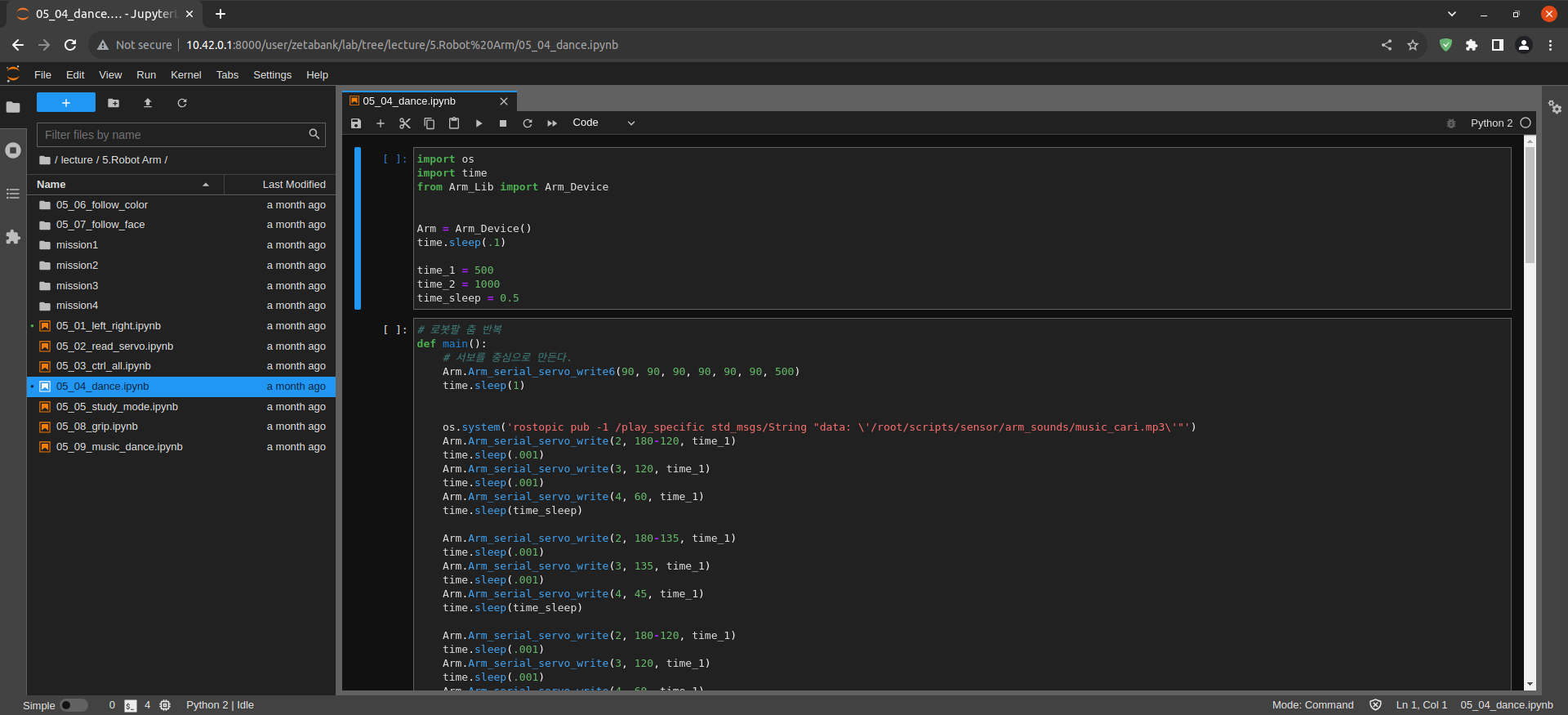
Run the cells
- With your team members, se
Ctrl + Enter