Compare Color Image and Depth Image via Widget
Follow along: Compare Color Image and Depth Image via Widget
The program launching process along with parameter settings are all simplified and set up on the Jupyter Notebook Environment.
- Open the 01_06_Depth_Comparison_2.ipynb Jupyter Notebook.
- Compares the rgb image and the depth image and outputs it to the display via jupyter notebook.
(The Jetson Board used for these examples are => Jetson Nano)
01_06_Depth_Comparison_2.ipynb
- Running the cell code.Ctrl + Enter
Load the modules needed to run your code.
import os
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import clear_output
import pyrealsense2 as rs
Create the RealSense pipeline and configuration.
# Create the RealSense pipeline and configuration
pipe = rs.pipeline()
cfg = rs.config()
print("Pipeline is created")
print("Searching Devices..")
selected_devices = []
Detect and list available RealSense devices.
# Detect and list available RealSense devices
for d in rs.context().devices:
selected_devices.append(d)
print(d.get_info(rs.camera_info.name))
if not selected_devices:
print("No RealSense device is connected!")
rgb_sensor = depth_sensor = None
Find RGB and Depth sensors in the connected devices.
# Find RGB and Depth sensors in the connected devices
for device in selected_devices:
print("Required sensors for device:", device.get_info(rs.camera_info.name))
for s in device.sensors:
if s.get_info(rs.camera_info.name) == 'RGB Camera':
print(" - RGB sensor found")
rgb_sensor = s
if s.get_info(rs.camera_info.name) == 'Stereo Module':
depth_sensor = s
print(" - Depth sensor found")
colorizer = rs.colorizer()
Start the RealSense pipeline.
# Start the RealSense pipeline
profile = pipe.start(cfg)
Create a figure for displaying frames and display.
# Create a figure for displaying frames
fig, axs = plt.subplots(nrows=1, ncols=2, figsize=(12, 4))
title = ["Depth Image", "RGB Image"]
try:
while True: # Enter a continuous loop for image display
frameset = pipe.wait_for_frames()
depth_frame = frameset.get_depth_frame()
color_frame = frameset.get_color_frame()
colorized_streams = []
if depth_frame:
colorized_streams.append(np.asanyarray(colorizer.colorize(depth_frame).get_data()))
if color_frame:
colorized_streams.append(np.asanyarray(color_frame.get_data()))
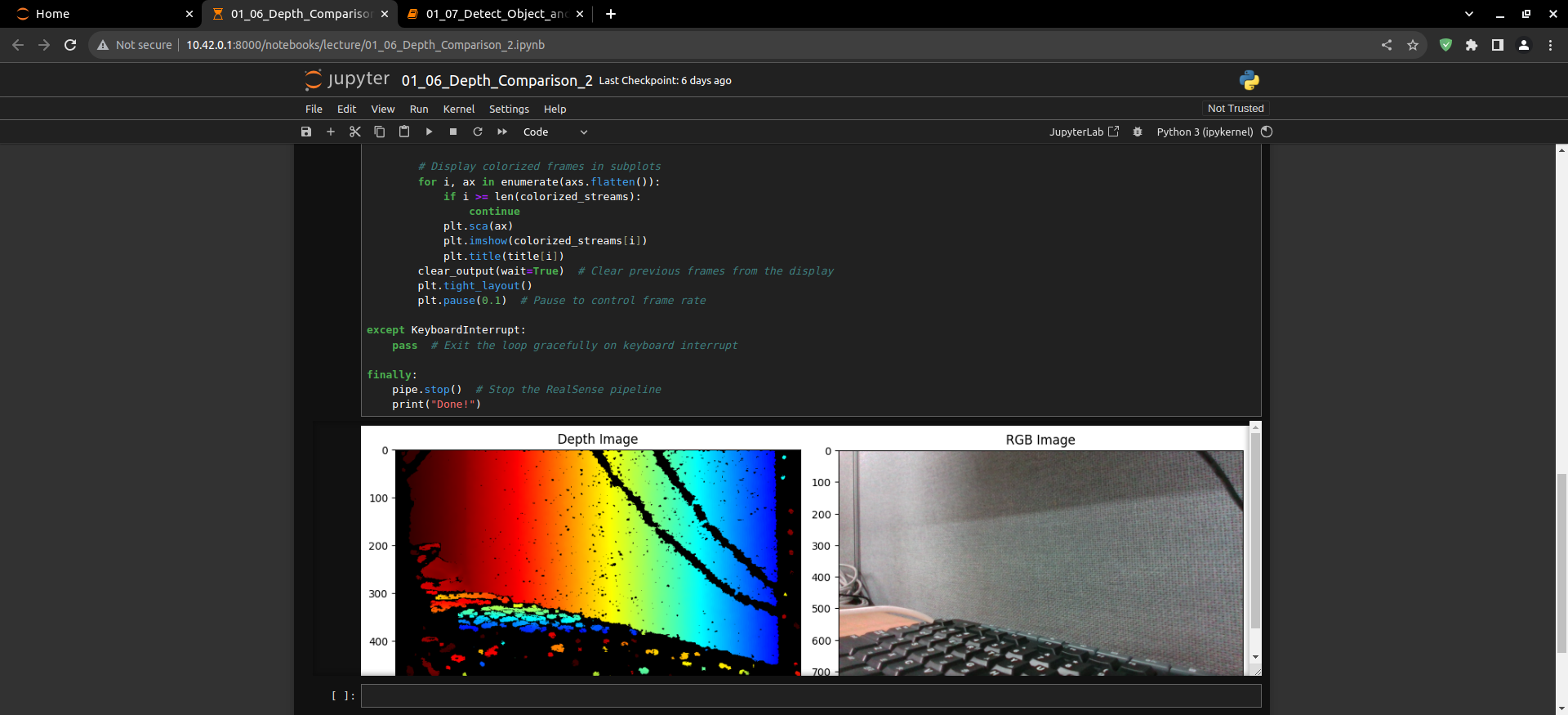
# Display colorized frames in subplots
for i, ax in enumerate(axs.flatten()):
if i >= len(colorized_streams):
continue
plt.sca(ax)
plt.imshow(colorized_streams[i])
plt.title(title[i])
clear_output(wait=True) # Clear previous frames from the display
plt.tight_layout()
plt.pause(0.1) # Pause to control frame rate
except KeyboardInterrupt:
pass # Exit the loop gracefully on keyboard interrupt
finally:
pipe.stop() # Stop the RealSense pipeline
print("Done!")
If executed correctly, the following window will appear on the Jupyter Notebook.