Gripper Control
Follow along: Gripper Control
The program launching process along with parameter settings are all simplified and set up on the Jupyter Notebook Environment.
- Open the 05_08_grip.ipynb Jupyter Notebook.
- Load Arm_Lib module and register the robot arm as an object.
- Follow and Execute the example codes.
(The Jetson Board used for these examples are => Jetson Nano)
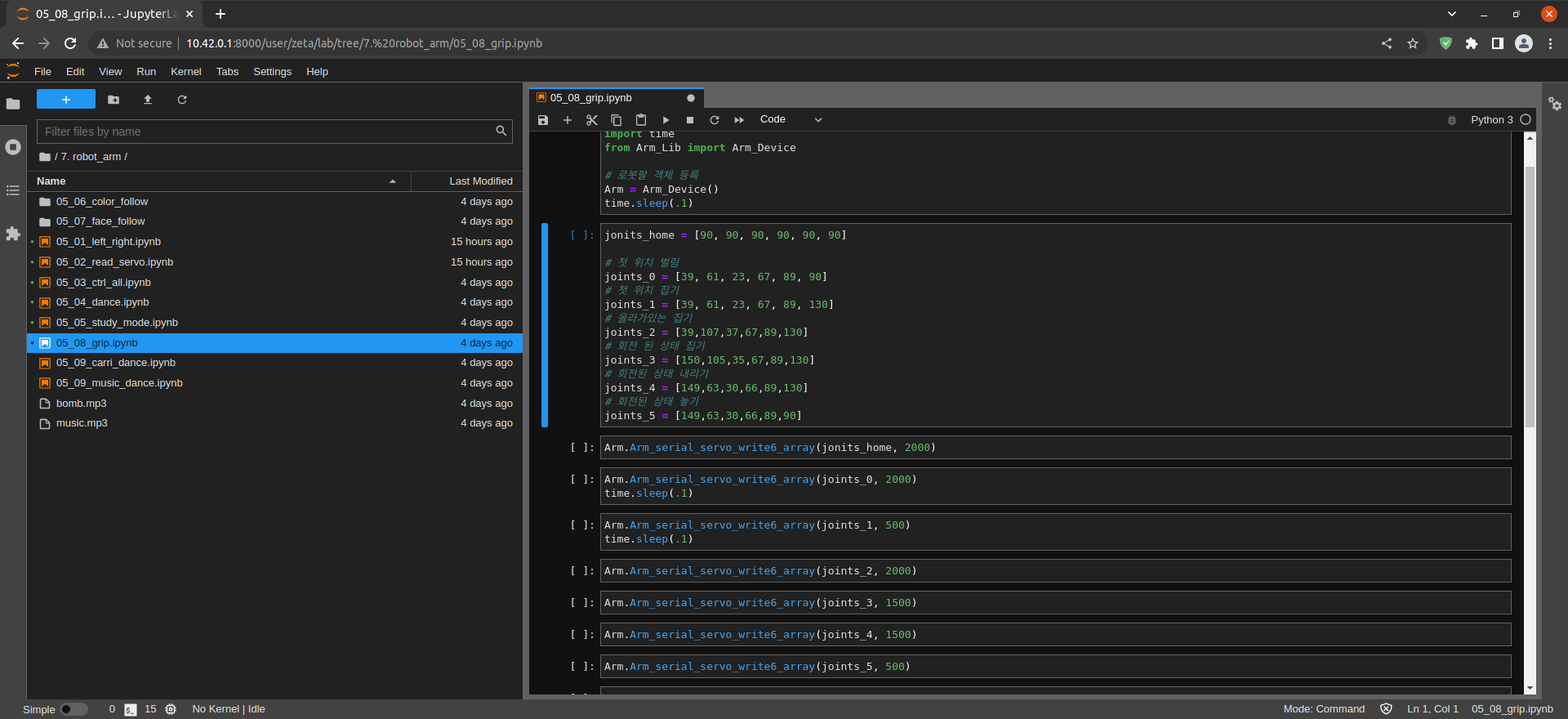
05_08_grip.ipynb
- Running the cell code.Ctrl + Enter
To control the robot arm from code, don’t forget to shut down the docker container. See here.
Load Arm_Lib module and register the robot arm as an object.
import time
from Arm_Lib import Arm_Device
# Register robot arm object.
Arm = Arm_Device()
time.sleep(.1)
list = [motor 1, motor 2, motor 3, motor 4, motor 5, motor 6]
jonits_home = [90, 90, 90, 90, 90, 90]
# Open first position.
joints_0 = [39, 61, 23, 67, 89, 90]
# Close first position.
joints_1 = [39, 61, 23, 67, 89, 130]
# Heighten first position.
joints_2 = [39,107,37,67,89,130]
# Pick the rotated state.
joints_3 = [150,105,35,67,89,130]
# lower the rotated state.
joints_4 = [149,63,30,66,89,130]
# release the rotated state.
joints_5 = [149,63,30,66,89,90]
Pick and Place through servo motor and gripper control.
Arm.Arm_serial_servo_write6_array(jonits_home, 2000)
Arm_serial_servo_write6_array(list, time)
Arm_serial_servo_write6_array(list, time)
Arm.Arm_serial_servo_write6_array(joints_1, 500)
time.sleep(.1)
Arm.Arm_serial_servo_write6_array(joints_2, 2000)
Arm.Arm_serial_servo_write6_array(joints_3, 1500)
Arm.Arm_serial_servo_write6_array(joints_4, 1500)
Arm.Arm_serial_servo_write6_array(joints_5, 500)
Remove the robot arm object.
del Arm # Remove robot arm object.